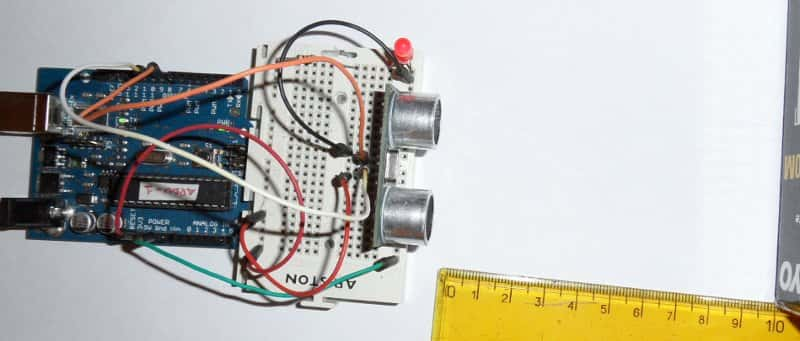
El montaje es el siguiente:
La asignación de los pin de arduino que se conectan al
hc-sr04 se pueden cambiar a gusto de cada uno.
En mi montaje la conexión es la siguiente:
ARDUINO Digital
|
HC-SR04
|
GND
|
GND
|
5V
|
Vcc
|
9
|
Trig
|
8
|
Echo
|
En este primer montaje solo realizamos el detector que manda la
distancia hasta el obstaculo al ordenador mediante la conexion
usb.
// Ultrasonic - Library for HR-SC04 Ultrasonic Ranging Module.
// SETA43
// xsetaseta@gmail.com
#include <Ultrasonic.h>
Ultrasonic ultrasonic(9,8); // (Trig PIN,Echo PIN)
int sonar; //Declaramos la variable sonar
void setup() {
Serial.begin(9600);
}
void loop()
{
sonar = ultrasonic.Ranging(CM); //Leemos la distancia del sonar
Serial.print(sonar); // CM or INC
Serial.println(" cm" );
delay(100);
}
|
Programa que utiliza la librería
Ultrasonic.
En la versión de esta librería que he utilizado,
está colocada para que solo mida hasta 50cm.
Para medir hasta 5m debes modificar el archivo de la
librería
Ultrasonic.ccp.
Cambiar:
Time_out=3000; // 30ms 5 metros // 3ms 50cm
// SETA43
// xsetaseta@gmail.com
//29-11-2012
#define ECHOPIN 8 // Pin to receive echo pulse (Echo PIN)
#define TRIGPIN 9 // Pin to send trigger pulse (Trig PIN)
unsigned int tiempo,distancia;
void setup() {
Serial.begin(9600);
pinMode(ECHOPIN, INPUT);
pinMode(TRIGPIN, OUTPUT);
}
void loop()
{
digitalWrite(TRIGPIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIGPIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIGPIN, LOW);
// Calcula la distancia midiendo el tiemp que est el pin ECHOPIN en alto.
tiempo = pulseIn(ECHOPIN, HIGH);
// La velocidad del sonido es 340 m/s o 29 microsegundos por centimetro.
distancia= tiempo/58;
//manda la distancia al puerto serie.
Serial.print(distancia);
Serial.println(" cm");
delay(200);
}
|
En este caso no utiliza ninguna librería, emplea el
comando
pulseIn.
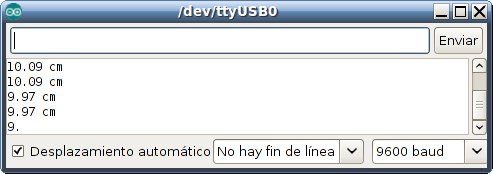
Consola del arduino recibiendo datos de distancia.
En el caso que vemos en la consola, hemos utilizado float para
ver decimales en los centímetros.
Una vez probado el funcionamiento del circuito, nos disponemos a
poner el altavoz piezoelectrico.
Al utilizar un altavoz piezoelectrico no hace falta
colocar resistencia debido a su alta impedancia.
Si se utiliza un altavoz de 8 ohmios se debería utilizar
una resistencia en serie de 330 ohmios.
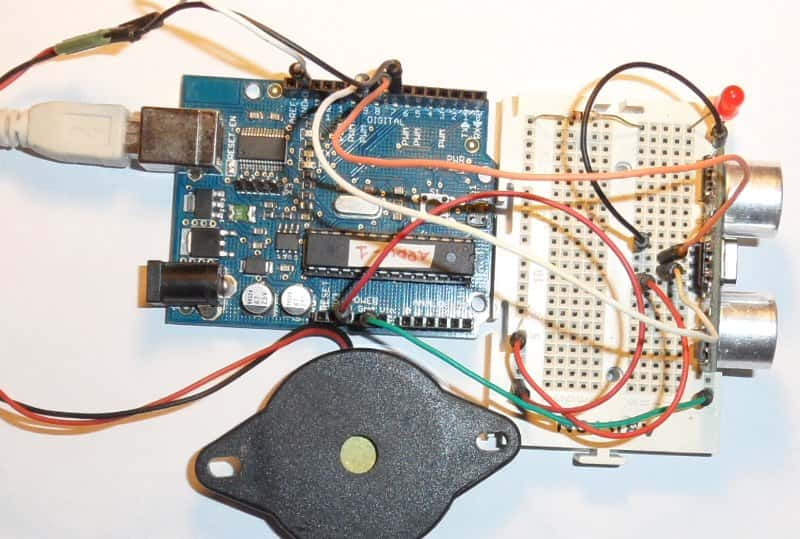
La conexión del altavoz se realiza al pin Digital 7, y a
la masa GND.
También se puede variar el pin de conexión en el
programa.
// SETA43
// xsetaseta@gmail.com
//29-11-2012
#define ECHOPIN 8 // Pin to receive echo pulse (Echo PIN)
#define TRIGPIN 9 // Pin to send trigger pulse (Trig PIN)
#define PINTONO 7
unsigned int tiempo,distancia;
void setup() {
Serial.begin(9600);
pinMode(ECHOPIN, INPUT);
pinMode(TRIGPIN, OUTPUT);
pinMode(PINTONO, OUTPUT);
}
void loop()
{
digitalWrite(TRIGPIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIGPIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIGPIN, LOW);
// Calcula la distancia midiendo el tiemp que est el pin ECHOPIN en alto.
tiempo = pulseIn(ECHOPIN, HIGH);
// La velocidad del sonido es 340 m/s o 29 microsegundos por centimetro.
distancia= tiempo/58;
//manda la distancia al puerto serie.
Serial.print(distancia);
Serial.println(" cm");
tone(PINTONO,2000);
delay(200);
//Si la distancia es menor que 10cm, produce un tono continuo
if (distancia>10)noTone(PINTONO);
delay(distancia*3);
}
|
Vídeo del montaje funcionando:
http://youtu.be/Efmkj8W7ai
Bibliografía:
http://electronicavm.wordpress.com/2011/07/07/sensor-de-aparcamiento-con-arduino/
http://www.ardublog.com/library-for-arduino-ultrasonic-ranging-hc-sr04/
Un saludo.
JUAN GALAZ
