Arduino
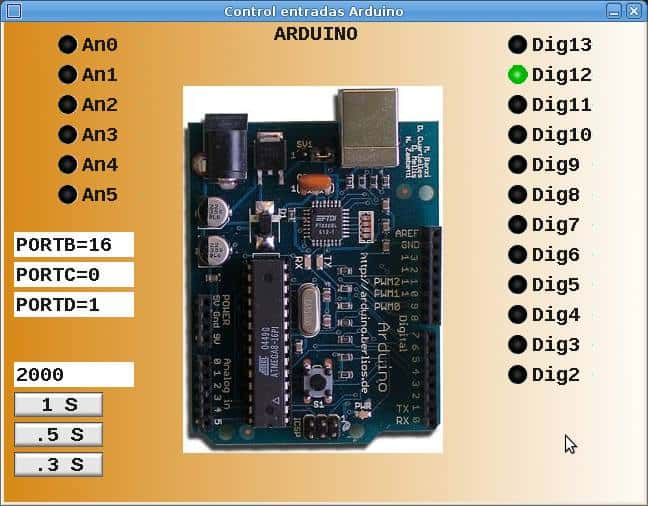
Control de entradas mediante rs232
Librería SDL
| if(!strcmp(entrada,"IPORTB")) { Serial.print("PORTB="); Serial.println(PINB); goto salir1; } if(!strcmp(entrada,"IPORTC")) { Serial.print("PORTC="); Serial.println(PINC); goto salir1; } if(!strcmp(entrada,"IPORTD")) { Serial.print("PORTD="); Serial.println(PIND); goto salir1; } |