Página principal
Coche
teledirigido
mando 3 ejes
nRF24L01
L293D
Arduino
xsetaseta@gmail.com
Este montaje es la continuación del
anterior montaje carreci.html .
En este montaje añado un mando reutilizado de un helicóptero que
tenía averiado.
Para el montaje he utilizado los 3 potenciómetros y el
conmutador de diferentes canales.
El primer potenciómetro es utilizado para la velocidad.
Los otros dos potenciómetros los utilizo como manejo de la
dirección.
El conmutador selecciona la velocidad de rotación del vehículo.
Pongo en conocimiento que cada mando de helicópteros es diferente,
por lo cual cada uno deberá modificar internamente el mando,
cortando pista o lo que sea necesario para que se pueda reutilizar.
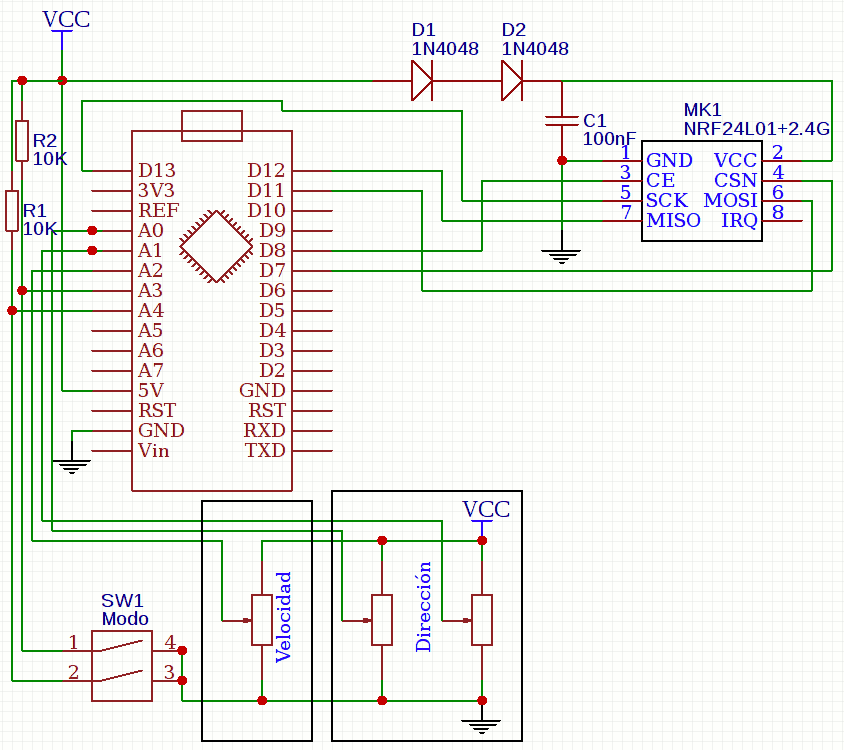
Esquema del emisor.
A nivel de programa se ha realizado bastantes cambios.
Se digitalizan los 3 potenciómetros , y se chequean los diferentes
interruptores.
Ahora se mandan 7 bytes con los datos digitalizados.
1-SENSOR0
Eje1
2-SENSOR1 Eje2
3-SENSOR2 Velocidad
4-SENSOR3 (nada , reservado)
5-ENTRADAS Las diferentes entradas en modo bit
El resto de bytes no se utilizan.
Los datos se mandan aproximadamente cada 100 miliSegundos , (algo
menos de 10 datos por segundo)
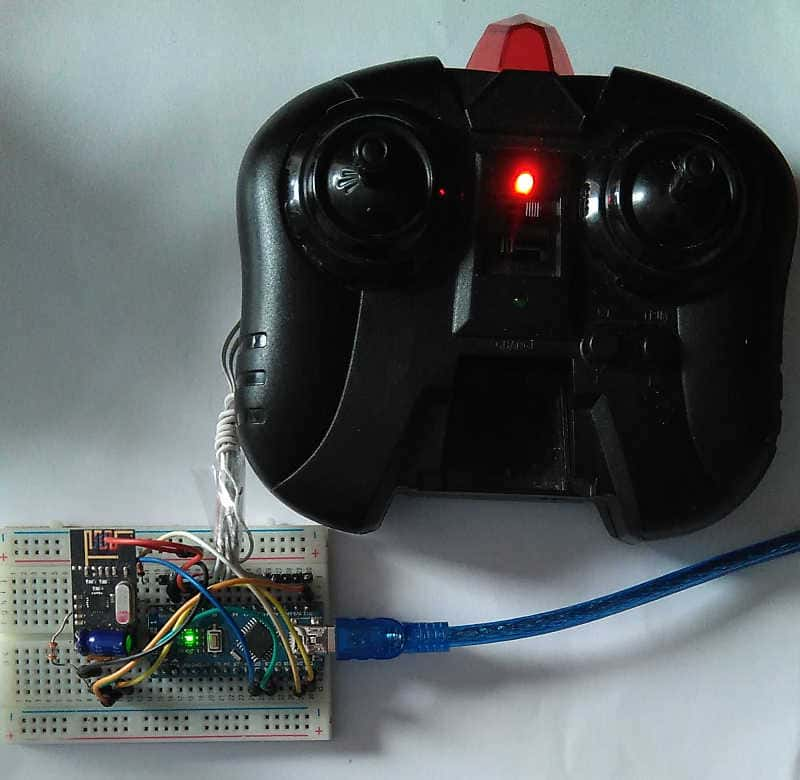
Emisor con el mando reciclado.
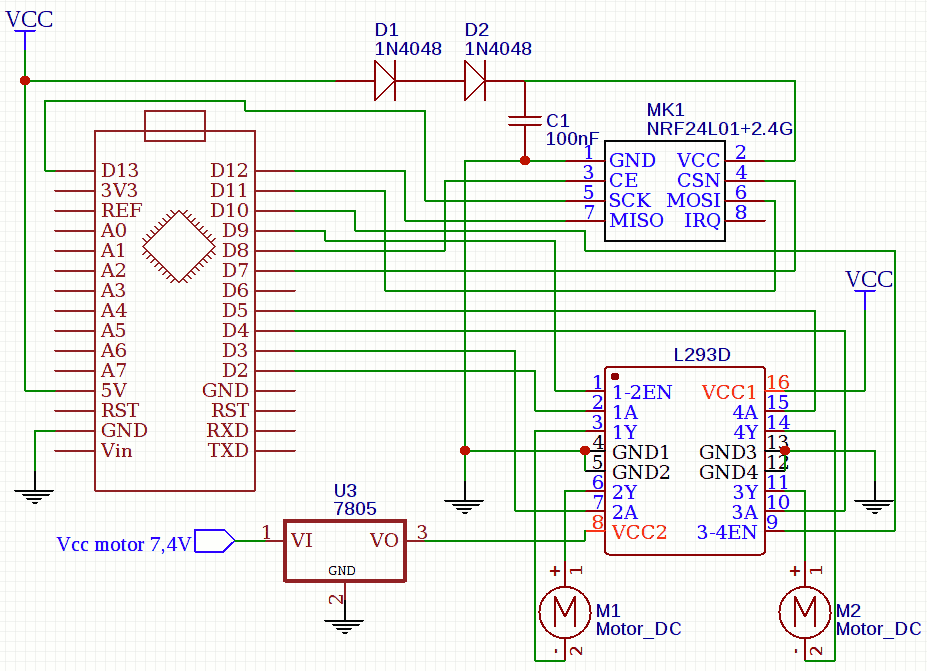
Esquema del receptor.
En el receptor he trabajado mas, hay bastantes cosas que he
modificado.
En primer lugar veía que había bastantes problemas con la
alimentación de los motores. Por lo que decidí alimentarlo a través
de dos baterías de 3,7V colocadas en serie y colocar un regulador de
tensión 7805 para estabilizar la tensión a 5V.
Uno de los mayores problemas que tuve era que al alimentar los
motores al arrancar, se necesitaba un impulso de energía extra.
La solución aunque parezca extraña fue mediante programa.
if(anterior==0)
{
analogWrite(9,255);
analogWrite(10,255);
anterior=1;
delay(90);
}
El programa detecta si se encuentra parado el vehículo, y en ese
caso aplica la máxima tensión durante 90 miliSegundos, el coche
rompe la inercia de parado, y luego aplica la tensión normal
para mantener la velocidad. Esto fue un gran descubrimiento para el
buen funcionamiento del vehículo.
Como quería controlar un poco la dirección cuando estaba en
movimiento. Reduje un poco la tensión en una de las ruedas cuando
movía el mando, consiguiendo que el vehículo girara hacia el lado
que quería.
El giro del vehículo desde parado lo he configurado para que se
efectué a saltos, era la mejor forma de controlarlo sin que se
pasase girando continuamente. En uno de los interruptores
seleccionamos la velocidad de giro entre 100mS y 50mS.
Debemos tener presente que el receptor tiene dos motores de
escobilla que producen bastantes interferencia, así como consumos
puntuales en el arranque. Por lo que recomiendo que se alimente
independientemente la parte de los motores de la parte del arduino.
Este montaje es un mero montaje de prácticas que funciona.
Para un montaje mas ambicioso deberíamos saber la alimentación de
las baterías 6V o 12 V, un regulador adecuado con pocas
perdidas. Colocar un regulador para los módulos emisor y transmisor.
También utilizar los módulos con antena y mayor potencia que pueden
alcanzar hasta 1Km en campo abierto.
Espero que le guste a alguien este montaje, o que le pueda
proporcionar ideas.
PROGRAMA
Saludos.
Juan Galaz
Bibliografía:
Mando
a distancia de 4 reles (relay)
Arduino-Android-Bluetooth-hc05-Manejando
un coche-mediante nRF24
Coche
teledirigido