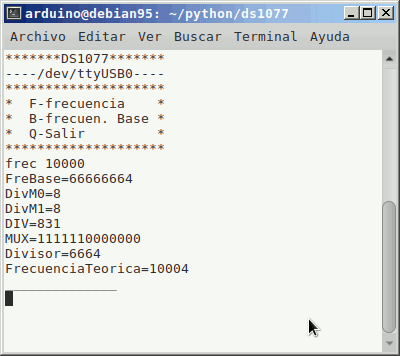
Divisor de frecuencia programable.
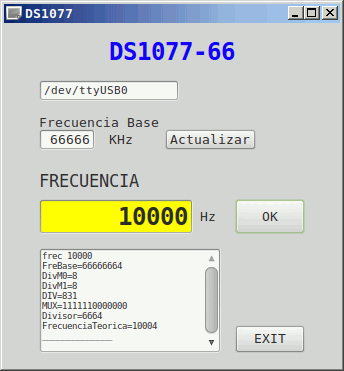
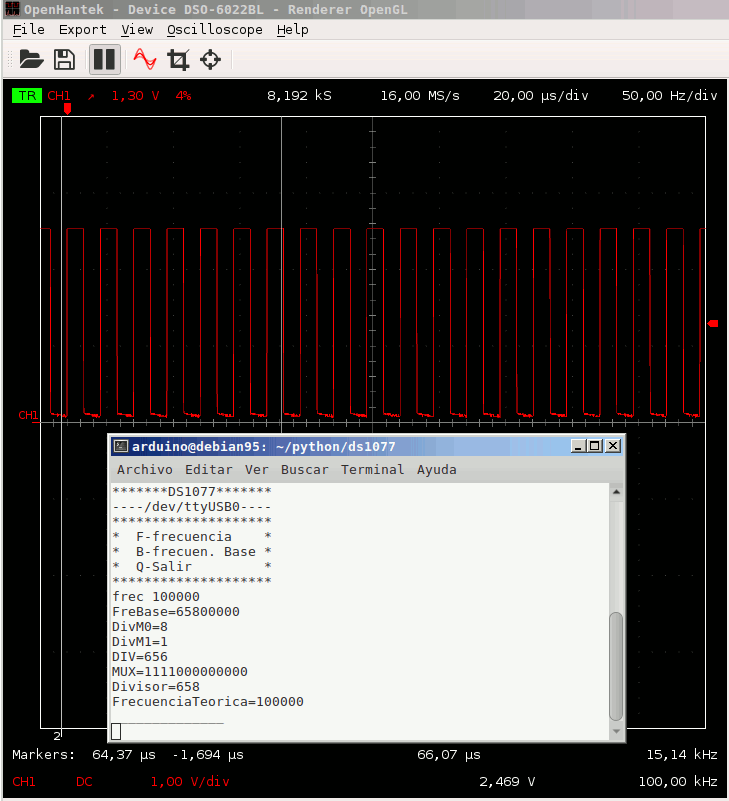
Generador de frecuencia
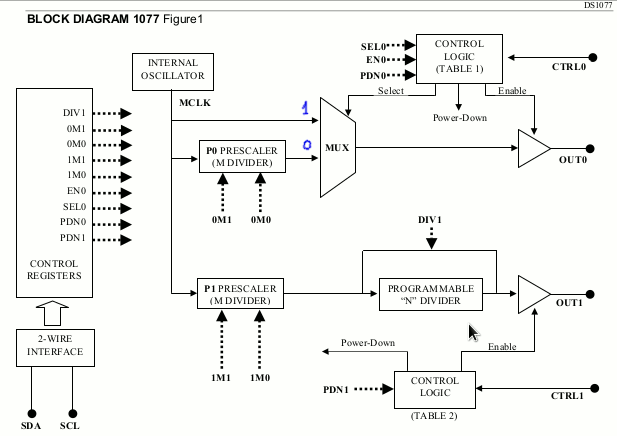
| PRESCALER P0
(0M1-0M0) |
| 0 MCLK /1
66,6 MHz 1 MCLK /2 33,3 MHz 2 MCLK /4 15,65 MHz 3 MCLK /8 8,32 MHz |
| PRESCALER P1
(1M1-1M0) |
| 0 MCLK /1
66,6 MHz 1 MCLK /2 33,3 MHz 2 MCLK /4 15,65 MHz 3 MCLK /8 8,32 MHz |

| DIV |
DIV-decimal |
DIVISOR |
| 0 000 000 000 0 000 000 001 0 000 000 010 0 000 000 011 1 111 111 111 |
0 1 2 3 1023 |
/2 /3 /4 /5 /1025 |

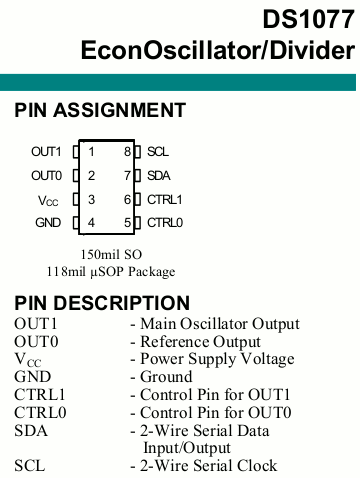
| DS1077_ADDRESS 0b1011000 Access DIV [01] If R/ W is 0, this command writes to the DIV register. After issuing this command, the next data byte value is to be written into the DIV register. If R/ W is 1, the next data byte read is the value stored in the DIV register. Access MUX [02] If R/ W is 0, this command writes to the MUX register. After issuing this command, the next data byte value is to be written into the MUX register. If R/ W is 1, the next data byte read is the value stored in the MUX register. Access BUS [0D] If R/ W is 0, this command writes to the BUS register. After issuing this command, the next data byte value is to be written into the BUS register. If R/ W is 1, the next data byte read is the value stored in the BUS register. Write E2 [3F] If WC = 0 the EEPROM is automatically written to at the end of each command. This is a DEFAULT condition. In this case the command WRITE E2 is not needed. |
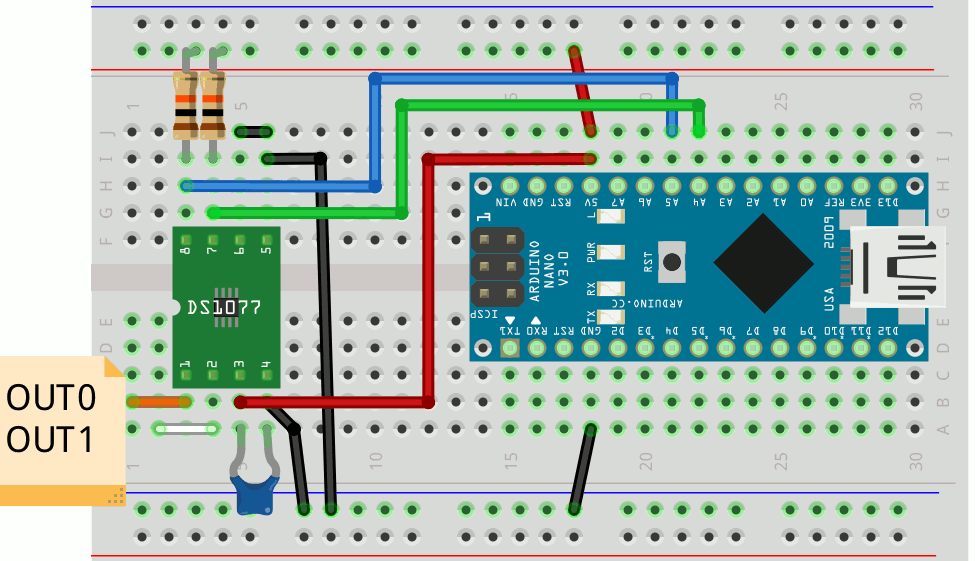
| Comandos reconocidos |
| MDIV
[0-1] Activar prescaler
[0=enable, 1=disable] DIVX [0-1023] Divider dividir[2-1025] 00000000 00000000 /2 00000000 00000001 /3 00000000 00000010 /4 00000000 00000011 /5 MX0M [0-3] Prescaler 0 div[1,2,4,8] MX1M [0-3] Prescaler 1 div[1,2,4,8] FREB [Frecuencia KHz] Default=66666 FREC [Frecuencia] LIST Lista todos los estados RDIV [0-65536] RMUX [0-65536] RBUS [0-65536] RWRI [0-65536] |