| int LeerSD() { File midataFile; midataFile=SD.open("html.txt", FILE_READ); if(midataFile) { while (midataFile.available()) { client.write(midataFile.read()); } midataFile.close(); } else { Serial.println("Error read SD "); } } |
| ISR(TIMER1_COMPA_vect) { bandera=1; segundos++; if(segundos>59) { segundos=0; minutos++; if(minutos>59) { minutos=0; horas++; if(horas>23) { segundos=0; minutos=0; horas=0; } } } } |
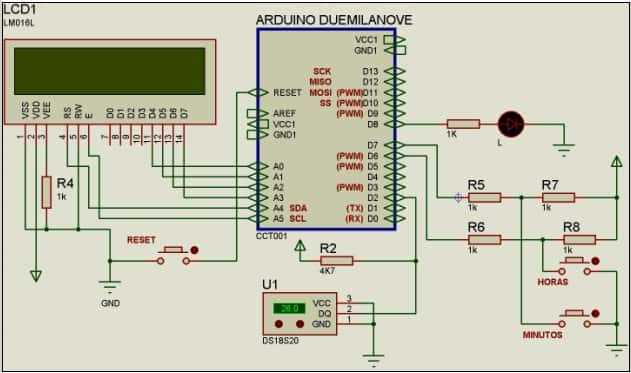
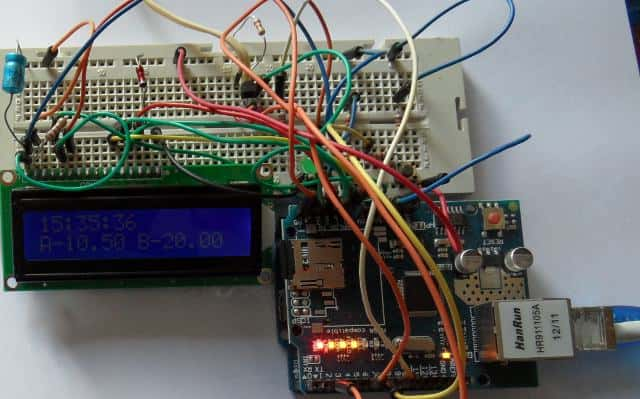
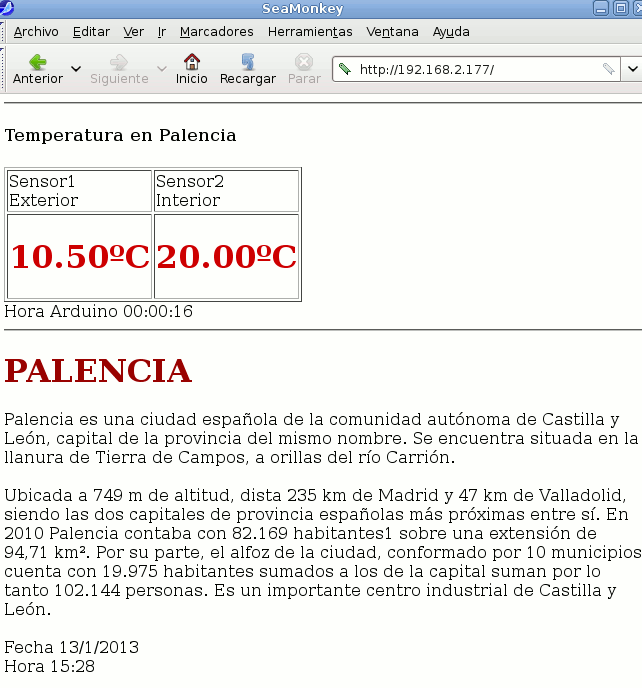
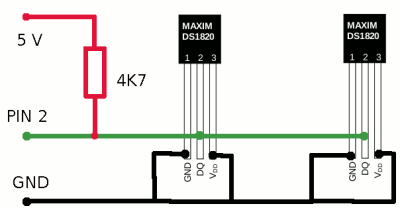
// SETA43 // Modificacion 5-01-2012 //servidor web_ficheros #include <SD.h> #include <SPI.h> #include <Ethernet.h> #include <OneWire.h> #include <LiquidCrystal.h> LiquidCrystal lcd(18, 19, 14, 15, 16, 17); char horas,minutos,segundos; char bandera=1; char VARI[30]="0"; //numero de MAC //numero de ip, depende de tu red byte mac[] = { 0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED }; IPAddress ip(192,168,2, 177); EthernetClient client; static char valor[10]; float ftempe; float sensor1; float sensor2; byte LedPin=8; //Led OneWire ds(2); // pin utilizado para el bus Onewire // Inicializa la libreria Ethernet // Selecciona el puerto 80, por defecto HTTP): EthernetServer server(80); void setup() { pinMode(18, OUTPUT); pinMode(19, OUTPUT); pinMode(14, OUTPUT); pinMode(15, OUTPUT); pinMode(16, OUTPUT); pinMode(17, OUTPUT); lcd.begin(16, 2); pinMode(LedPin, OUTPUT); //Led pinMode(4, OUTPUT); // Declaramos el pin ChipSelect como salida Serial.begin(9600); Serial.println("Servidor WEB almacenada en SD"); Serial.println("Iniciando tarjeta SD"); // Texto informativo if(!SD.begin(4)) { Serial.println("Tarjeta erronea o no insertada"); return; } Serial.println("Tarjeta OK"); // Texto informativo Ethernet.begin(mac, ip); server.begin(); Serial.print("Servidor en "); Serial.println(Ethernet.localIP()); pinMode(6, INPUT); pinMode(7, INPUT); cli(); TCCR1A=0; TCCR1B=0; OCR1A=15624; TCCR1B |= (1<<WGM12); TCCR1B |= (1<<CS10); TCCR1B |= (1<<CS12); TIMSK1=(1<<OCIE1A); sei(); } ISR(TIMER1_COMPA_vect) { bandera=1; segundos++; if(segundos>59) { segundos=0; minutos++; if(minutos>59) { minutos=0; horas++; if(horas>23) { segundos=0; minutos=0; horas=0; } } } } void loop() { if(segundos==5 || segundos==30 ) { LeerSensores(); Serial.println(VARI); lcd.setCursor(0, 1); lcd.print("A-"); lcd.print(sensor1); lcd.print(" B-"); lcd.print(sensor2); lcd.print(" "); } if(bandera) { bandera=0; sprintf(VARI,"%02d:%02d:%02d",horas,minutos,segundos); lcd.setCursor(0, 0); lcd.print(VARI); digitalWrite(LedPin, !digitalRead(LedPin)); } if(!digitalRead(7)) { minutos++; segundos=0; if(minutos==60)minutos=0; bandera=1; while(!digitalRead(7)); } if(!digitalRead(6)) { horas++; if(horas==24)horas=0; bandera=1; while(!digitalRead(6)); } client = server.available(); if (client) { Serial.println("new client"); boolean currentLineIsBlank = true; while (client.connected()) { if (client.available()) { char c = client.read(); Serial.write(c); if (c == '\n' && currentLineIsBlank) { client.println("HTTP/1.1 200 OK"); client.println("Content-Type: text/html"); client.println("Connnection: close"); client.println(); client.println("<!DOCTYPE HTML>"); client.println("<html>"); client.println("<hr>"); client.print("<h4>Temperatura en Palencia</h4>"); client.print("<table border=\"1\">"); client.print("<tr><td>Sensor1<br>Exterior</td><td >Sensor2<br>Interior</td></tr>"); client.print("<tr>"); client.print("<td><h1><font color=\"#cc0000\">"); client.print(sensor1); client.println("ºC"); client.print("</font></h1></td>"); client.print("<td><h1><font color=\"#cc0000\">"); client.print(sensor2); client.println("ºC"); client.print("</font></h1></td>"); client.print("</tr>"); client.print("</table>"); client.println("Hora Arduino "); client.println(VARI); client.println("<hr>"); LeerSD(); client.println("</html>"); break; } if (c == '\n') currentLineIsBlank = true; else if (c != '\r') currentLineIsBlank = false; } } delay(1); client.stop(); Serial.println("client disonnected"); } } int LeerSD() { File midataFile; midataFile=SD.open("html.txt", FILE_READ); if(midataFile) { while (midataFile.available()) { client.write(midataFile.read()); } midataFile.close(); } else { Serial.println("Error read SD "); } } int LeerSensores() { getTemp(1); sensor1=ftempe; getTemp(1); sensor2=ftempe; getTemp(0); Serial.print(sensor1); Serial.print(","); Serial.print(sensor2); Serial.println(" "); } int getTemp(char x) { byte data[12]; byte addr[8]; char i; byte MSB; byte LSB; if ( x==0 || !ds.search(addr)) { ds.reset_search(); return 0; } if ( OneWire::crc8( addr, 7) != addr[7]) { Serial.println("CRC is not valid!"); return -1; } if ( addr[0] != 0x10 && addr[0] != 0x28) { Serial.print("Device is not recognized"); return -1; } ds.reset(); ds.select(addr); ds.write(0x44,1); // start conversion, with parasite power on at the end delay(1000); // espera para que carge la tension el IC byte present = ds.reset(); ds.select(addr); ds.write(0xBE); // Read Scratchpad for ( i = 0; i < 9; i++) data[i] = ds.read(); MSB = data[1]; LSB = data[0]; float tempRead = ((MSB << 8) | LSB); //using two's compliment ftempe = tempRead / 2; return 1; } |